محققان دانشگاه MIT موفق به توسعه یک ربات پرنده شدهاند که به اندازه یک تمبر پستی است و میتواند تا ۱۵ دقیقه به طور پایدار در هوا معلق بماند و حرکات آکروباتیک انجام دهد.
این ربات الهامگرفته از حشرات، اگرچه کوچکترین روبات کنترلی دنیا نیست اما وزن آن تنها به اندازه یک کشمش است، میتواند بسیار طولانیتر از هر ربات پرنده حشرهمانند قبلی، بدون از هم پاشیدن پرواز کند و حرکات پیچیده انجام دهد.
برای اینکه رباتهای پرنده کوچک بتوانند مانورهای سریع و چابک انجام دهند، باید سبکوزن و چابک باشند، اما در عین حال قادر به تحمل نیروهای زیاد نیز باشند. این نیروها باعث میشوند که بیشتر رباتهای کوچک تنها حدود ۲۰ ثانیه بتوانند پرواز کنند و سپس از کار بیفتند. این مسئله جمعآوری دادههای کافی برای کالیبره کردن و آزمایش تواناییهای پروازی رباتها را دشوار میکند.
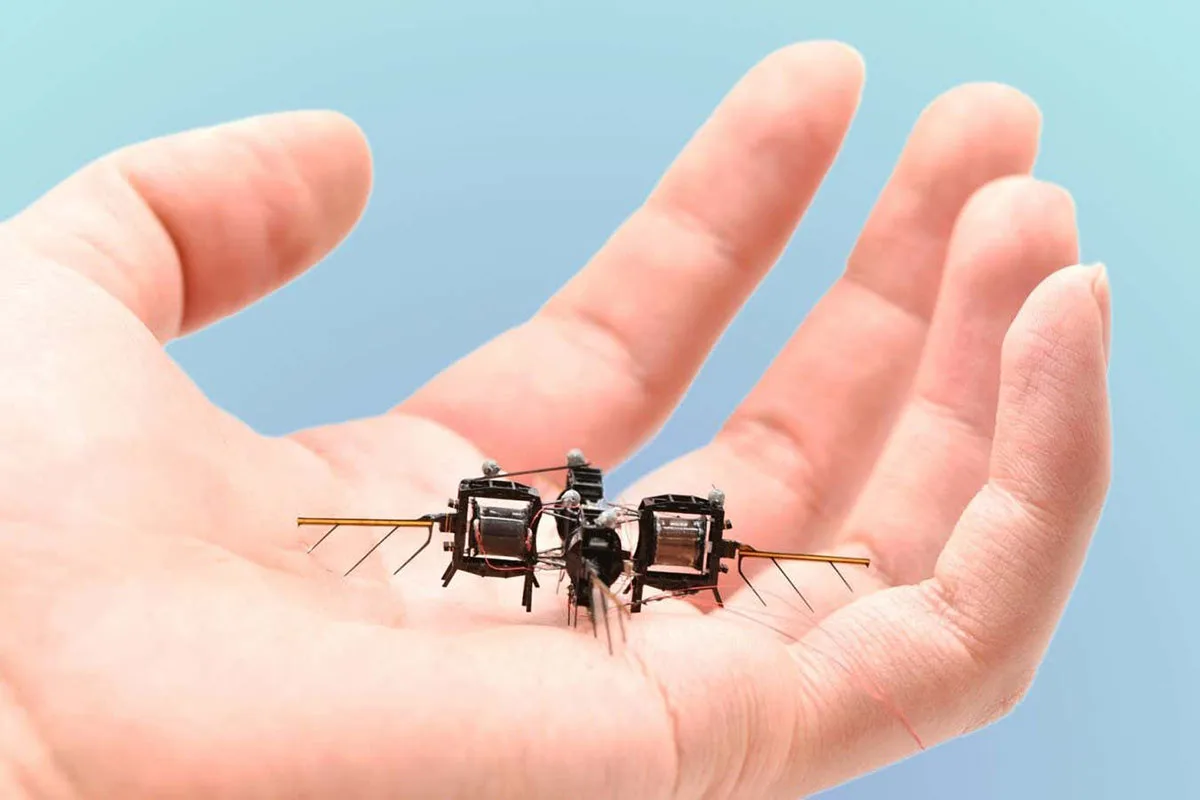
اکنون، سوهان کیم و همکارانش در مؤسسه فناوری ماساچوست (MIT) یک ربات پرنده حشرهمانند به اندازه یک تمبر پستی توسعه دادهاند که میتواند حرکات آکروباتیک مانند چرخش دوگانه یا رسم علامت بینهایت (∞) را انجام دهد و همچنین تا ۱۵ دقیقه بدون خرابی در هوا معلق بماند.
کیم و تیمش طراحی این ربات را از یک ربات پرنده قبلی اقتباس کردند، اما با ایجاد تغییراتی، مفاصل ربات را مقاومتر ساختند. به جای اینکه مفاصل تنها در یک نقطه به ربات متصل شوند، آنها را در بخش بزرگتری از ربات گسترش دادند.
این تغییر باعث شد نیروی وارد شده به مفاصل حدود ۱۰۰ برابر کاهش یابد. علاوه بر این، به جای استفاده از موتورهای الکتریکی معمولی، از محرکهای نرم عضلهمانند برای حرکت دادن بالها استفاده کردند. این پیشرفتها نه تنها باعث افزایش طول عمر پروازی ربات شده، بلکه امکان انجام مانورهای پیچیده و جمعآوری دادههای دقیقتر را نیز فراهم کرده است. این فناوری میتواند راه را برای توسعه رباتهای پرنده کوچک با کاربردهای گستردهتر، از نظارت محیطی تا عملیات امداد و نجات، هموار کند.
کیم میگوید: «اگر ربات تنها ۲۰ ثانیه بتواند پرواز کند و سپس از کار بیفتد، فرصت زیادی برای تنظیم و کنترل آن نداریم. اما با افزایش چشمگیر مدت زمان پرواز، توانستیم روی بخشهای کنترل کننده کار کنیم تا ربات بتواند مسیرهای پروازی دقیق را دنبال کند و حتی حرکات پیچیدهای مانند چرخشهای اکروباتیک را انجام دهد.»
این قابلیت ردیابی به ربات اجازه میدهد تا مسیرهای پروازی پیچیدهای را دنبال کند، مانند رسم حروف در هوا. کیم معتقد است که چنین مانورپذیری میتواند در آینده برای کاربردهایی مانند گردهافشانی مصنوعی گیاهان یا بازرسی بخشهایی از هواپیما که دسترسی به آنها برای انسان دشوار است، مورد استفاده قرار گیرد.
با این حال، این ربات در حال حاضر قادر به پرواز بدون اتصال نیست، زیرا تیم تحقیقاتی هنوز موفق به کوچکسازی منبع انرژی و قطعات الکترونیکی کنترل کننده آن نشدهاند. کیم امیدوار است که در طراحیهای آینده این مشکل را برطرف کند.
اهمیت دوام مکانیکی ربات پرنده
رافائل زوفرهای از مؤسسه فناوری ماساچوست (MIT) میگوید: «یکی از جنبههایی که اغلب کمتر به آن پرداخته میشود، مدت زمان دوام مکانیکی ربات هنگام پرواز است. محققان بیشتر روی عمر باتری و خودکارسازی رباتها تمرکز کردهاند، اما کمتر کسی به طول عمر مکانیکی آنها توجه کرده است. این مقاله به طور دقیق به این موضوع پرداخته است.»
این پیشرفتها نه تنها باعث بهبود عملکرد رباتهای پرنده کوچک شده، بلکه زمینه را برای توسعه فناوریهای آینده در حوزههایی مانند رباتیک، کشاورزی و صنایع هوایی هموار میکند. با ادامه تحقیقات، میتوان انتظار داشت که رباتهای پرنده کوچک در کنار رباتهای انساننما به ابزارهایی قدرتمند و کاربردی در زندگی روزمره تبدیل شوند.
source